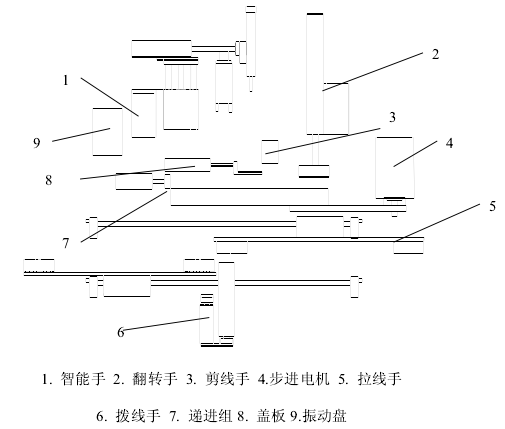
1.智能手需要实现的功能:
(1) 取未绕置铜线的磁环。需要绕置铜线的磁环从振动盘出来后停在了指定的位置,
此时,智能手将磁环夹起,放到递进轮中间,从而实现自动上料;
(2) 夹取铜线。智能手实现夹持住铜线,将铜线布到磁环上面;
(3) 压铜线穿过磁环。智能手上的压线杆构件能按设计原理那样将布在磁环上的铜线压过磁环;
(4) 取已经绕置完铜线的磁环。在铜线绕置完成后,智能手将磁环取出,放入指定位置。
2.拨线手需要实现的功能:
拨线手把压线杆压过磁环的铜线下拉,由于压线部件长度有限,在部件将铜线压过磁环后,铜线并没有全部穿过磁环,需要机构将铜线全不穿过磁环。
在设计时考虑到很难用单一的的一个机构来实现该动作,因此考虑用拨线手和分线手两个机构来共同完成将铜线全部穿过磁环的动作。
3.拉线手需要实现的功能:
拉线手将拨线手拉下的铜线拉扯开,使铜线全部通过磁环,以便进行下一圈的绕线。拉线手完成绕线基本原理里拉线这一步骤。
4.翻转手需要实现的功能:
铜线在穿过磁环后,需要被再次布在磁环上面以进行下一圈绕线,翻转手就是实现该功能的机构。
5.剪线手需要实现的功能:
铜线的预送和拉线手拉出所需要长度后的剪断需要一个机构来完成,剪线手便是实现该动作的机构。
剪线手在拉线手完成第一次拉线,达到绕置一个磁环所需要的铜线长度后将铜线剪断,同时预留出铜线头以便下一个磁环绕置时智能手能捏取铜线。
6.盖板需要实现的功能:
铜线放在磁环上面时需要一个机构来对铜线进行限位,防止铜线偏移而导致压线杆无法压到铜线或者压偏铜线造成产品质量问题,盖板可以实现上述功能。
盖板盖在磁环上面,一方面可以起到固定磁环的作用,另外很重要的一个作用是起到引导铜线的作用,通过盖板上的导槽,可以防止铜线偏斜而影响绕线质量或造成绕出磁环报废。
7.递进组需要实现的功能:
递进组部分是该自动磁环绕线机中重要部件之一,其主要作用主要有两个:一是夹紧磁环,使磁环在绕线过程中不至于松动;二是带动磁环旋转,当磁环在绕置完一圈线之后,递进组需要使磁环转动一定角度,以绕置下一圈线。
8.振动盘需要实现的功能:
由于需要实现绕线的全自动化,因此磁环上下料亦需要机构来完成,振动盘就是通过振动作用,将磁环送至指定位置,从而实现系统的全自动化。

全自动绕线机主体部分系统构成原理图
以上各功能模块共同完成绕线动作,依照各部分功能所设计出的全自动绕线机主体部分系统构成原理图如图 2-2 所示。
全自动绕线机绕线步骤
在明确了各部分机构在整个绕线过程中实现的功能后,各机构动作顺序亦是实现绕线的关键。根据绕线基本原理和各部分所实现的功能而确立的全自动绕线机绕线步骤简图如下图所示。

 精密平行绕线机
精密平行绕线机 精密环型绕线机
精密环型绕线机 自动飞叉绕线机
自动飞叉绕线机 全自动设备系列
全自动设备系列 精密线圈
精密线圈 包胶线圈
包胶线圈 精密马达线圈
精密马达线圈 空芯线圈
空芯线圈 变压器线圈
变压器线圈