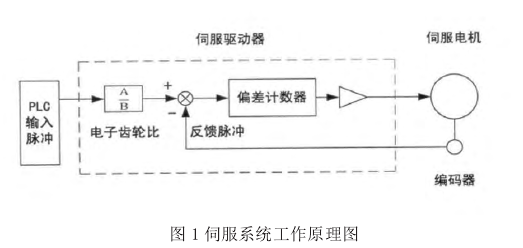
一、绕线机伺服系统的工作原理
控制系统中的伺服驱动器是伺服系统中的核心部件,其起到了对伺服电机的控制与对排线指令的传达任务,伺服控制系统与伺服电机联合组成了完整的闭环伺服机构,如图1所示,绕线机的伺服电机工作产生的电机脉冲数可以通过控制系统中的编码先传达到伺服驱动器中,通过与预设的脉冲数值进行比较运算,可以正确的识别伺服电机的位置,并且进行识别通过这种方式,可以有效的提高伺服电机定位精度,与此同时,系统对PLC的输入脉冲也能够很好的接收,并且传达给伺服电机,实现的完整的控制循环。
二、伺服系统的性能指标
综合衡量本排线系统的设计要求,笔者认为较为理想的选择对象是低惯量伺服电机,与之匹配的驱动器具有输入电压三相230V或单项AC 230V,入电频率为20/60HZ,,适用于0.2KW以下的伺服电机,期位置信号有三种输入方式,分别为,脉冲一方向、A/B脉冲串。HC-MFS23的主要技术参数:额定输出功率为0.2ICW;额定输出转知0.64Nni,最大输出转知1.9Nm ;额定转速为3000r/min。
三、自动排线伺服的控制原理
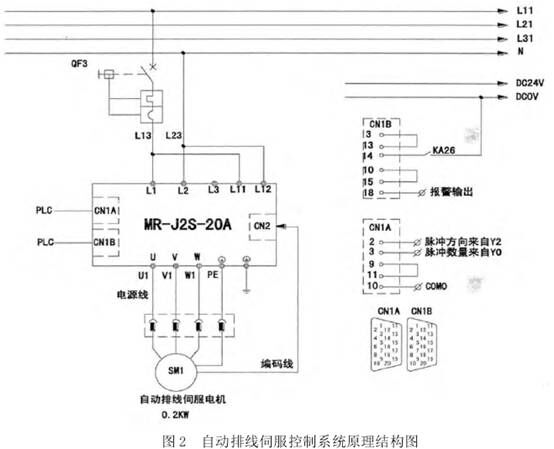
绕线机的自动排线伺服控制原理如图2所示,本系统主要包分为了主电路和端子控制电路两部分。
(一)主电路
伺服驱动器的单相电源需要被连接在L1/2/11/12端口,对于伺服驱动器来说,L3端口可以为空。驱动器的U/V/W为电机的电源供给端,需要提供220V的三相电源,CN2通过编码先接收伺服电机的反馈信号,用以实现该自动排线控制系统的闭环控制。
(二)端子控制电路
对于端子控制电路来说,不同的伺服控制器的端子定义有所不同,本系统的设计主要以控制模式为主要对象。
1.CNlA端
M R-J2S-20A中的CNlA端的2,3号端子主要的作用是接收反转脉冲与正转脉冲数,这样伺服驱动器才能够有效的接收三种形式的组合脉冲,通过设置控制器的参数能够设置为脉冲+正方向。这样,2号端子可以连接PLC端Y2启,实现对PLC端的脉冲量输出接口YO的对接。
CNlA端的9号、10号和11号的连接方式适用于接收PLC发送的集电极开路的脉冲信号,其中9号端子为集电极端,与11号内部电源端连接,然后10号端子与PLC输出口YO和Y2的公共端C0610连接起来,经过这样的配置后,PLC发送的脉冲和方向信号才能被伺服驱动器识别。
2.CN1B端
本系统中的CN1B端子的3号与13号端子的定义为控制端提供24V的直流电源。
3.CN1B的15号端子为强制停IF端子,如果该端子与]0号公共端子断开,则伺服电机将被强制停IF:该端子与10号公共端短路,则解除强制停止状态。
4.CN 1B的14号和18号端子分别为伺服驱动器的故障复位端和故障报警输出端。伺服驱动器发生故障时,驱动器与电机之间的主电路断开,动态制动器开始动作,伺服电机立即停止运行:同时PLC接收到伺服驱动器故障报警信号,控制外围主电路电源断开:报警原因排除后可通过复位端子使驱动器重新工作。
东莞市龙鑫电子生产销售各类绕线机、自动绕线机、全自动绕线机,龙鑫电子有多年的生产经验,能解决各种绕线机的难题,如大家有采购意向和技术问题,可来电咨询我们。

 精密平行绕线机
精密平行绕线机 精密环型绕线机
精密环型绕线机 自动飞叉绕线机
自动飞叉绕线机 全自动设备系列
全自动设备系列 精密线圈
精密线圈 包胶线圈
包胶线圈 精密马达线圈
精密马达线圈 空芯线圈
空芯线圈 变压器线圈
变压器线圈