绕线机广泛用于电力、矿山机械、家具加工等行业,为通用设备。通过对佛山市绕线机企业生产现场调研,发现全市所使用的LX系列环形绕线机均存在较大的安全隐患,一旦操作不当,不仅绕组作废,而且可能会对人的手指造成严重伤害。为了降低绕组的废品率以及增加安全性,本研究提出一种控制系统加装在绕线机上,对作业进行智能保护。

1安全防护系统总体设计
1.1确定设计方案
本项目研究对控制系统的要求:①提高绕组质量,减少安全事故;②整个控制系统操作简便、成本低、体积小;③根据人机工程学要求去安装系统。
通过调研分析后,本项目确定通过改装脚踏调速器,以达到降低绕线机速度,提高绕线机的安全性。脚踏调速器工作原理如同滑动变阻器工作原理一样,调速器是通过改变绕线变频器外部控制回路电阻阻值大小,进而改变绕线变频器控制回路两端电压的大小,就可以改变绕线变频器输出回路频率大小,达到改变绕线电机速度。因此,本研究确定在脚踏调速控制回路中,加装绕线机防护系统,根据不同危险程度窜入不同阻值的电阻,以改变绕线电机的速度,即储线环的转速。
确定总体设计方案是制作一套“绕线机安全防护装置”:当操作者的手进入危险区域内时,由反射器发出的红外光线反射到接受器中,红外传感器将低电平信号反馈给逻辑芯片,接着逻辑控制芯片根据所输入信号的位置,通过单片机或逻辑判断,将控制信号输出至继电器降速模块,使不同阻值的电阻串接进脚踏调速回路中,进而改变脚踏装置的电压比例,从而降低绕线机变频器的频率,达到降低绕线电机转速的效果,保证了操作者安全,防止操作工人因操作不当,造成伤害,有效提高绕线机的安全性。
绕线机安全防护装置原理如图1,其中c通过各种开关及负载接绕线和排线变频器的“VIN”接口;d1通过各种开关及负载接排线变频器的“12V”接口;d2接绕线和排线变频器的“0V”接口;U为绕线变频器的两端电压的电压源,改变电压U的大小,就可以改变绕线变频器和排线变频器输出电压频率大小达到可以控制绕线电机的转速,即储线环的转速。

1. 2安全防护装置工作原理及思路
本系统是基于龙鑫的LX系列环形绕线机设计的,通过佛山市富士川电业有限公司实地考察以及与操作人员交谈后发现:工人在操作龙鑫的LX系列环形绕线机时是将未绕线铁芯放入3个滚动轮中,具体操作是打开储线环本体燕尾锁条,将储线环开口活动段分开,让未绕线铁芯中心空位穿越储线环开口部分;然后锁上锁条,踩下脚踏开关,使储线环转动,其最高转速可达700 r/min,中途需用手将绕线铁心中的线头拔到另一边去。由于绕线机转速过快,工人需要很快的速度而又熟练的动作去操作,这时就出现2种伤指现象:①己断漆包线断头会插入手指,造成手指受伤;②高速运转的铜丝会压到手指,轻者手指皮外出,重者压断手指。
1. 3变频器工作原理
交流变频器的工作原理:变频技术是通过变频器改变电源频率,从而改变交流异步电动机的转速的一种技术。通过变频器先进行交流到直流的变换,再通过变频器进行直流到交流的变换,从而控制交流电机的转速。而本项目的龙鑫LX系列环形绕线机对变频器的控制是通过控制输入变频器的模拟电压,进而控制变频器输出电源的频率,使交流电机的转速跟随输出电源频率的变化而变化。
1. 4三相异步电动机变频调速
三相异步电动机转速n=60f/p(1-s),可见,改变供电频率f、电动机的极对数P及转差率s均可达到改变转速的目的。
异步电动机的转矩是电机的磁通与转子内流过电流之间相互作用而产生的,在额定频率下,如果电压一定而只降低频率,那么磁通就过大,磁回路饱和,严重时将烧毁电机。因此,频率与电压要成比例地改变,即改变频率的同时控制变频器输出电压,使电动机的磁通保持一定,避免弱磁和磁饱和现象的产生。
由于通用变频器一般采用V/f控制,即变压变频(VVVF)方式调速,改变频率和电压是最优的电机控制方法。因此选择了变频调速方法,变频调速是改变电动机定子电源的频率,从而改变其同步转速的调速方法。其特点:①效率高,调速过程中没有附加损耗;②应用范围广,可用于笼型异步电动机;③调速范围大、特性硬、精度高。
1. 5系统基本组成
最初设计该系统主要由51单片机最小系统、光电隔离继电器模块和红外线数字避障传感器组成。其中51单片机最小系统包括电源、外部晶振电路、复位电路和STC89C52芯片,后期经过实践,采用逻辑控制模块更精准。该防护装置主要由红外线数字避障传感器、逻辑控制模块和继电器降速模块组成。
安全防护装置结构如图2所示:当操作人员的手进入危险区域时,红外线数字传感器将检测到的信号反馈给逻辑控制模块,逻辑控制模块根据所反馈的信号输出相应控制信号至继电器降速模块,继电器降速模块将不同阻值电阻串接进脚踏调速回路中,实现降低绕线电机的转速,从而起到安全防护作用。

2系统装置的设计和安装
2. 1人机工程学理论
人机工程学是一门研究人在某种工作环境中的解剖学、生理学和心理学等方面的各种因素;研究人和机器及环境间的相互作用;研究在工作中、家庭生活中和体假时怎样统一考虑工作效率、人的健康、安全和舒适等问题的学科。它的主要研究内容包括人体特性的研究、人机系统的总体设计、工作场所和信息传递装置的设计、环境控制与安全保护设计等几个方向。目前在国内这门学科的名称尚未得到统一,出现了人类工效学、人体工程学、人机环境系统工程等名称,不同的名称反映了在研究侧重点或方法上存在着一些差异。
应用人机工程学能够给人机设计提供科学的指导,能使得机械设备的设计更加人性化,使处于不同环境下的人能安全地、有效地、健康地进行工作和生活,以实现人一机一环境之间的最佳匹配。
2. 2系统装置的人机工程学分析
研究绕线机安全防护装置时应结合人机工程学进行设计和制作,以使得防护装置实现安全可靠、与机械装备配套设计、简单、经济、方便的原则。安全防护装置的作用是避免操作人员在误操作时,机械传动机构对操作者的伤害。绕线机在运行时,当操作者的手进入危险区内时,红外光束受阻,红外光线反射到接收器中,传感器发出反馈电信号给逻辑控制模块,逻辑控制模块输出控制信号控制继电器模块,使适当阻值的电阻串入脚踏调速回路中,进而改变变频器控制回路模拟电压的大小从而减少绕线变频器的频率,达到降低绕线电机的转速,保证了操作者安全,使工人能够有足够的时间将手伸出来,以免受到伤害。
绕线机安全防护装置应该符合以下要求:①防护装置保障在操作人员的手进入危险区域时,有足够时间避免危害;②防护装置必须使其固定,防止被非管理人员移动;③防护装置不能妨碍工人的操作。
2. 3系统装置的模型设计及安装
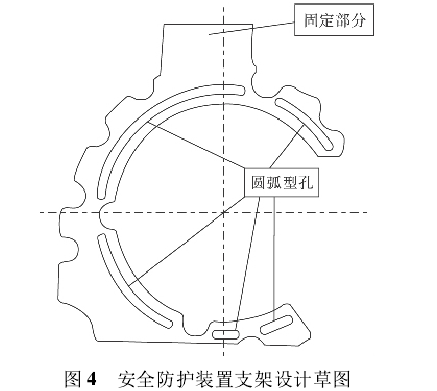
通过对龙鑫的LX系列环形绕线机储线环以及机头板的结构进行分析,决定将红外线数字避障传感器安装在如图3所在位置,既满足人机工程学原理也达到防护装置的检测要求。
选用有机玻璃作为安全防护装置原型机的支架的材料。安全防护装置的支架如图3和图4所示,其中,圆弧型孔所在位置是用于安装红外线数字避障传感器,圆弧型孔有助于在调试时移动传感器的位置以及角度,从而达到最好的检测效果,使得安全度达到最高值,更好地降低安全事故发生率,得到最好的研究效果。
3硬件部分组成
3.1逻辑控制芯片的选择
本项目中逻辑控制芯片用于接收传感器反馈的输入信号,并根据反馈信号输出相应控制信号给继电器控制模块,从而实现降低绕线圈转速的目的。逻辑芯片符合本项目控制要求。
3. 2继电器模块
本项目所采用的电磁式继电器由铁芯、线圈、衔铁、触点簧片等组成。只要在线圈两端加上一定的电压,线圈中就会流过一定的电流,从而产生电磁效应,衔铁就会在电磁力吸引的作用下克服返回弹簧的拉力吸向铁芯,从而带动衔铁的动触点与静触点(常开触点)吸合。当线圈断电后,电磁的吸力也随之消失,衔铁就会因弹簧的反作用力返回原来的位置,使动触点与原来的静触点(常闭触点)释放。这样吸合、释放,从而达到在电路中的导通、切断的目的。
对于继电器的“常开、常闭”触点,可以这样来区分:继电器线圈未通电时处于断开状态的静触点,称为“常开触点”;处于接通状态的静触点称为“常闭触点”。继电器一般有2股电路,为低压控制电路和高压工作电路。当继电器线圈两端无电压或电压不够时,继电器的公共端(CUM)与常闭端(NC)接通。当继电器线圈两端电压达到吸合时,继电器的公共端(CUM)与常开端(NO)接通,原理见图6。

3. 3红外线数字避障传感器
本项目选用了价格便宜、抗干扰性强、灵敏度高以及反应快的反射式红外线数字避障传感器博光-SONK,这是一种集发射与接收于一体的光电传感器。
检测距离可以根据要求进行调节。该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,可以广泛应用于机器人避障、流水线计件等众多场合。博光一SONK ( NPN型光电开关)其输出状态是0,1,即数字电路中的高电平和低电平。没检测到物体时输出高电平及VCC,检测到物体时输出低电平及0.7V。
4、联机测试
通电源,当按下安全防护装置的开关按键,安全防护装置红色指示灯亮,2继电器红色电源LED指示灯亮,处于常态(非动作状态),此时可调电阻R1, R2没有串入脚踏调速回路,绕线机稳定工作。当操作工人将手移动到次级红外线数字避障传感器检测范围时,次级继电器动作,常闭触点断开,常开触点吸合,相对应的黄色LED指示灯亮,这时脚踏调速回路中串入可调电阻R,使得总电阻增加,导致输入到绕线变频器的模拟电压的电压源U降低,绕线变频器的频率随之降低。根据三相异步电动机转速公式可知,这时绕线电机的转速n也随之降低,即储线环的转速也就降低了,这时工人操作的安全性也提高了。当工人手继续往储线环移动时,当进入一级红外线数字避障传感器检测范围时,一级继电器动作,常闭触点断开,常开触点吸合,黄色LED指示灯都亮,这时脚踏调速回路中串入可调电阻R, , Rz使得总电阻增加到最大,导致输入到绕线变频器的模拟电压的电压源U降到可调节的最低值,绕线变频器的频率随之降到最低,同样根据三相异步电动机转速公式可知,这时绕线电机的转速也进一步降低,即储线环的转速也就降到较低速度,这时工人操作的安全性再次提高。
本项目所设计安全防护装置需与绕线机配合完成工作,按照以下步骤进行测试:①检查安全防护装置接线是否正确;②将传感器安装到绕线机适当位置;③将安全防护装置串接到绕线机脚踏调速回路中;④将未绕线铁芯放入3个滚动轮中,打开储线环本体燕尾锁条,将储线环开口活动段分开,让未绕线铁芯中心空位穿越储线环开口部分,然后锁上锁条;⑤踩下脚踏开关,使储线环转动;⑥将两只手分别从储线环两边慢慢伸入到其中心位置,观察红外线数字避障传感器和继电器模块工作状态灯的发光情况及储线环转动的速度。
5、结论
基于本系统完成的4套护手装置己经在佛山市富士川电业有限公司安装,经过3个月的运行,没有发生安全事故,有效保护了设备和工人。本系统是基于龙鑫的环形绕线机设计的一种安全防护装置,弥补了市场同类产品的缺陷,加装该安全防护装置,能降低断指工伤的发生率,具有成本低、体积小、控制较精确等优点,普遍推广应用的价值大,市场潜力巨大,创造的社会、经济效益更值得期待。
 精密平行绕线机
精密平行绕线机 精密环型绕线机
精密环型绕线机 自动飞叉绕线机
自动飞叉绕线机 全自动设备系列
全自动设备系列 精密线圈
精密线圈 包胶线圈
包胶线圈 精密马达线圈
精密马达线圈 空芯线圈
空芯线圈 变压器线圈
变压器线圈